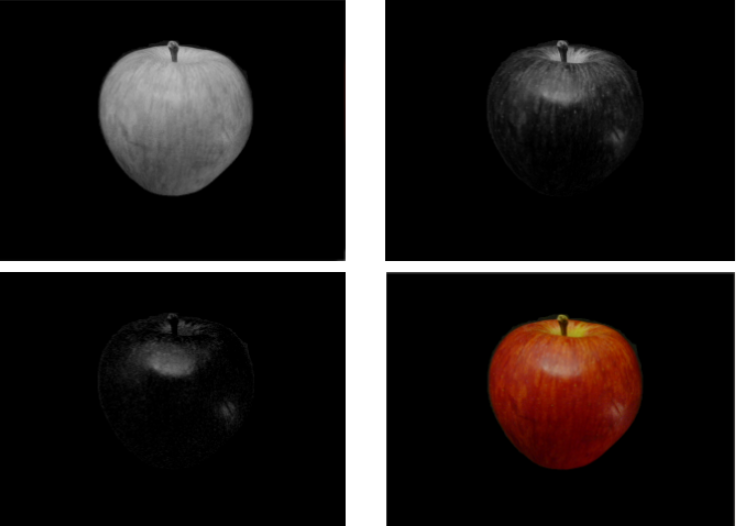
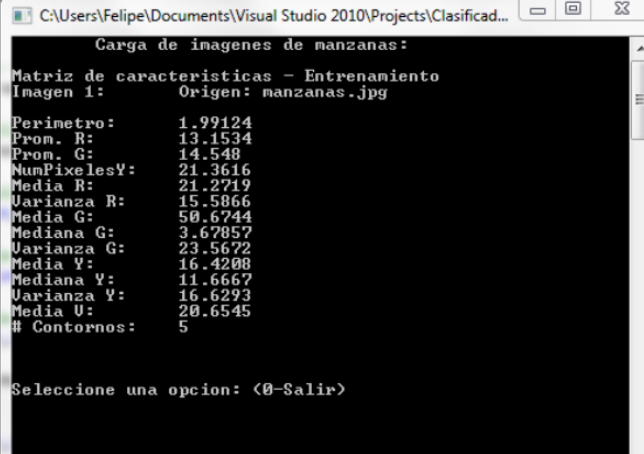
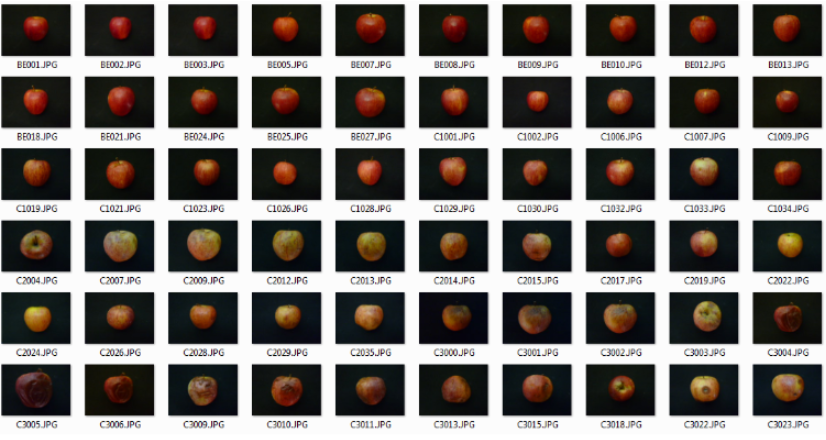
Apples classifier
During my bachelor in mechatronics I participated in a Computer Vision Project to classify apples trough a Neural Network using OpenCV. Document
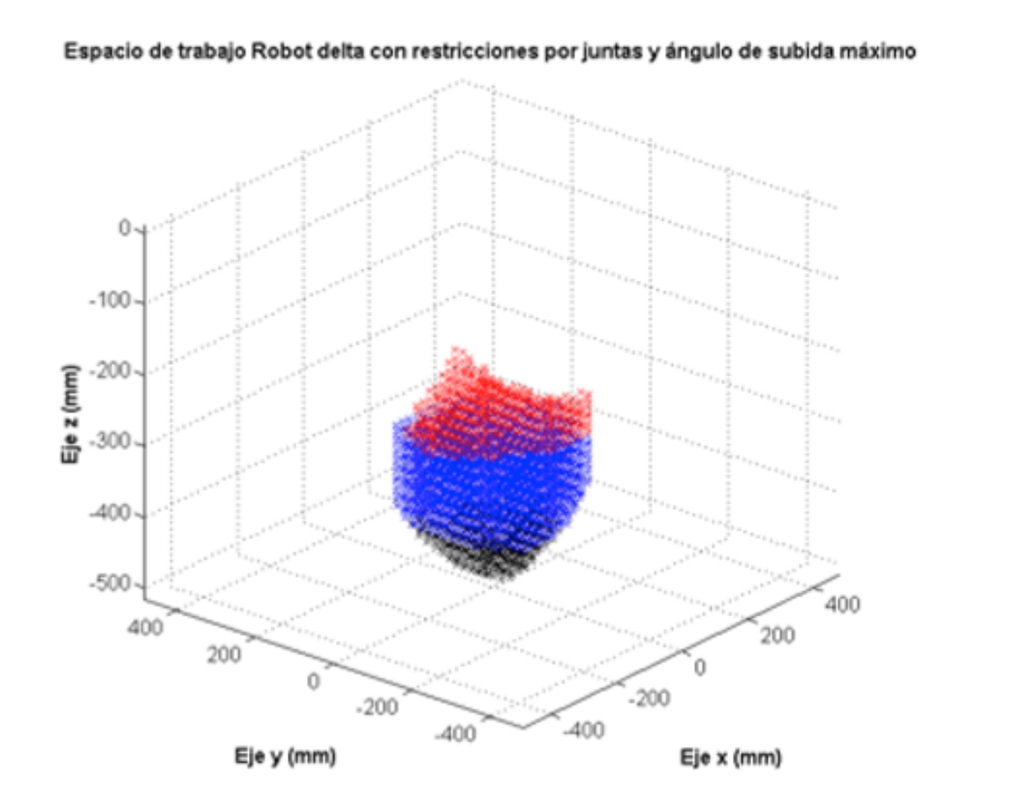
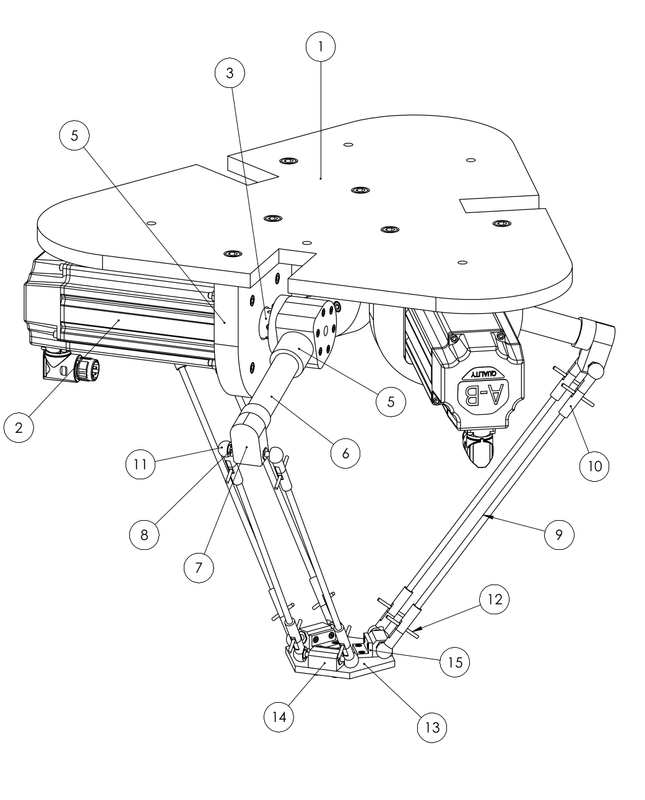
Delta Robot
My bachelor's thesis consisted of a Delta Robot detailed design. The robots dimesions were obtained using a basic optimization algorithm that maximized the robots workspace. The mechanical loads were goten using NX Nastran, which allowed the motor+controller selection process. Document

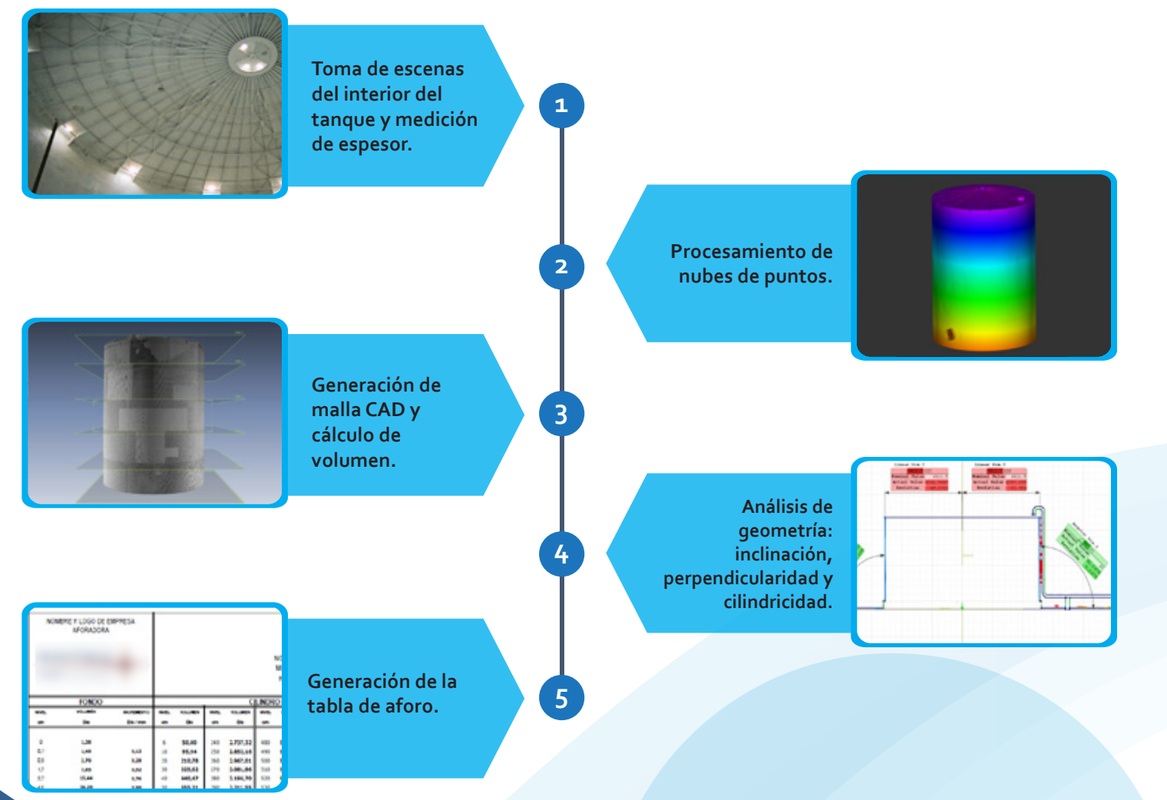
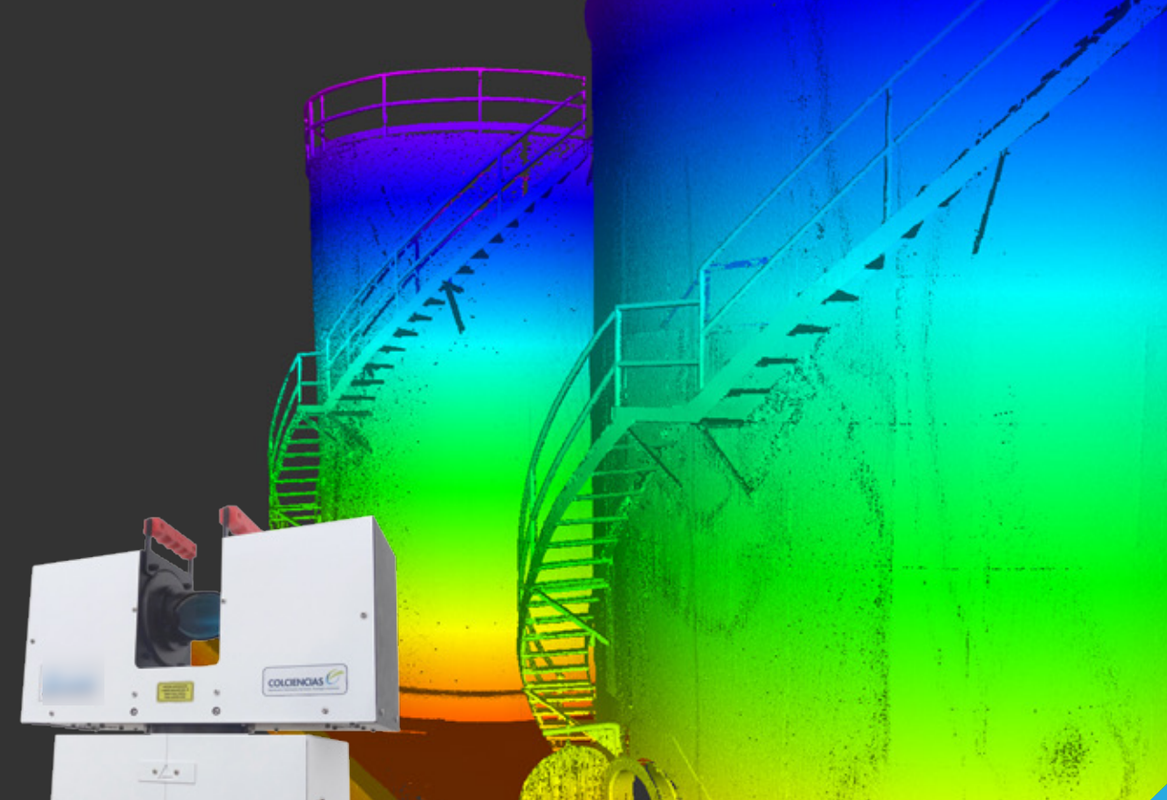
3D Laser Scanner
I worked as a R&D engineer for almost 3 years in an industrial automation company (Colsein). I participated in the design of a 3D laser scanner for tank calibration, I did mechanical design, manufacturing, electronic integration, point cloud and mesh analysis, software and calibration reports. The scanner was partially funded by the Colombian Institute for Science "Colciencias".

Universidad Nacional Assitant Teacher
I came back to academia as an assitant teacher in Robotics, I worked for 2 years, as a team with Prof. Pedro Cardenas, we changed the class, we introduced new tools as ROS, Robotics Toolbox fro Matlab, and we managed to promote new ideas in the students. I loved the job,but it lasted 2 years (from 2017-2 to 2019-1), it was probably one of the most beloved times in my life.
Classes repos: Github


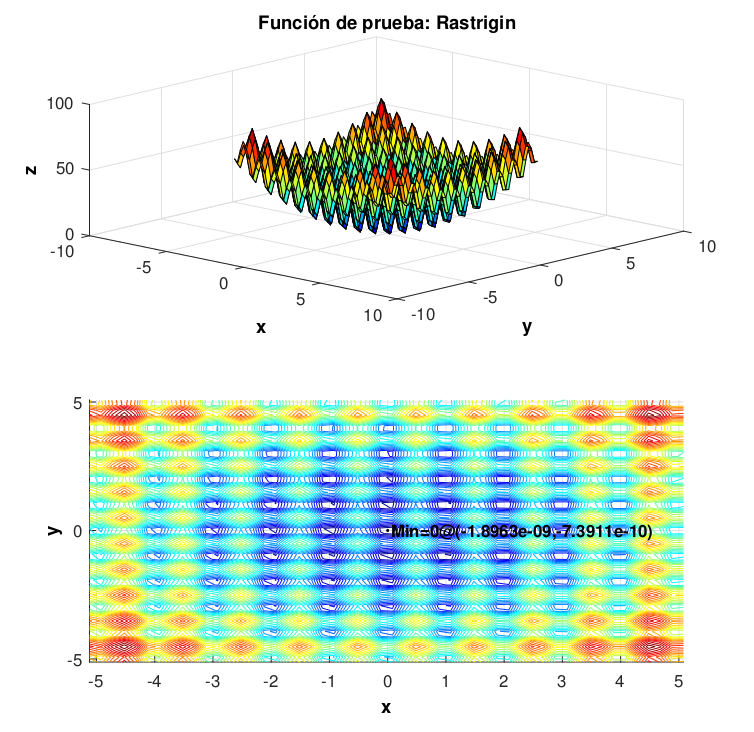
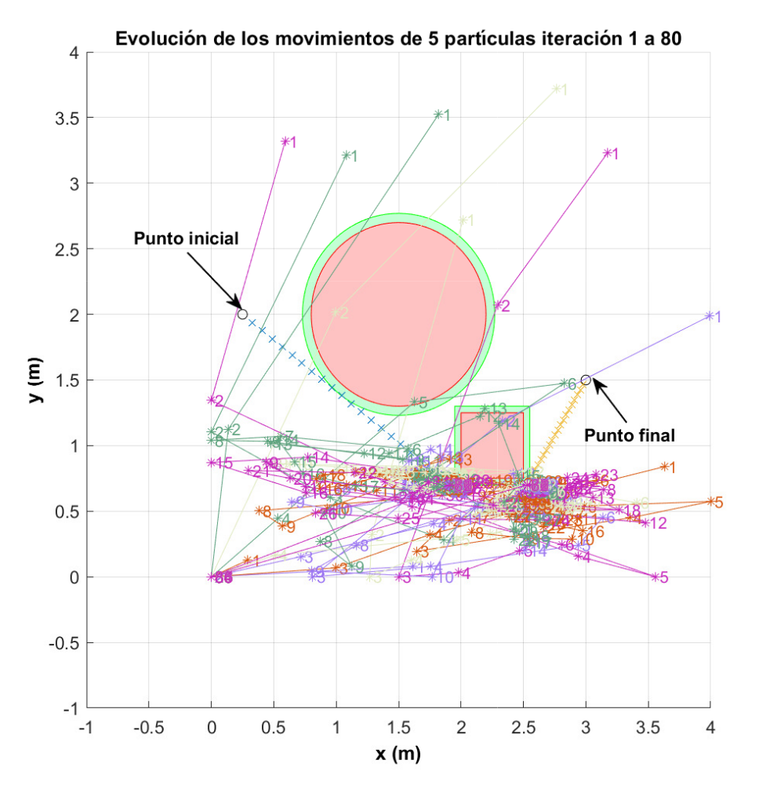
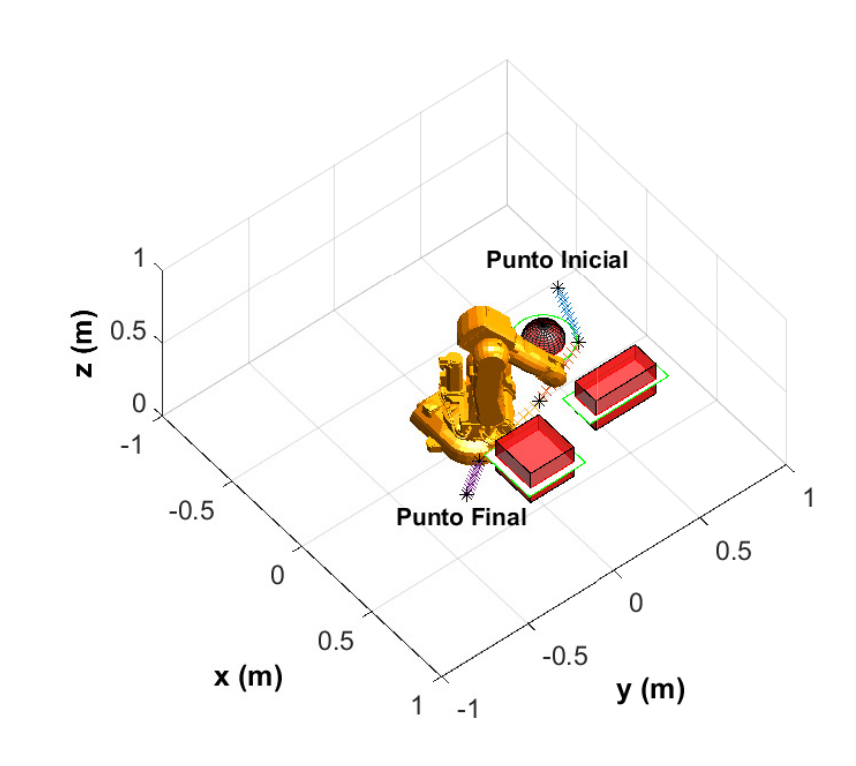
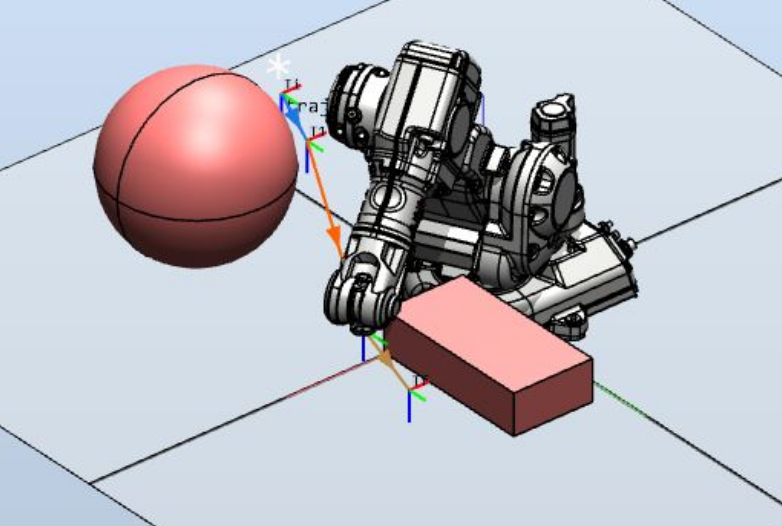
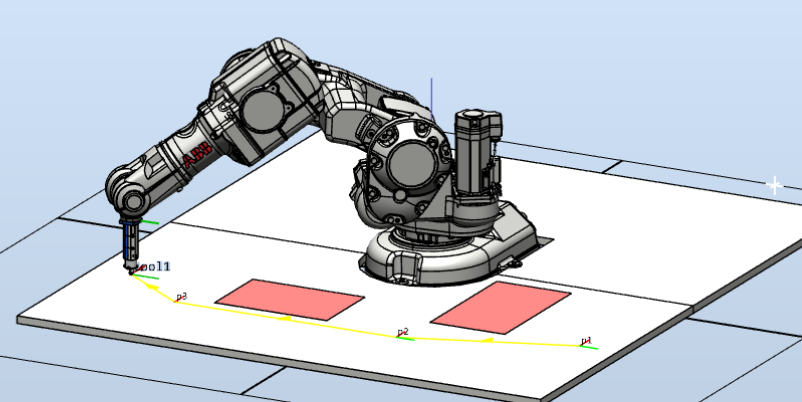
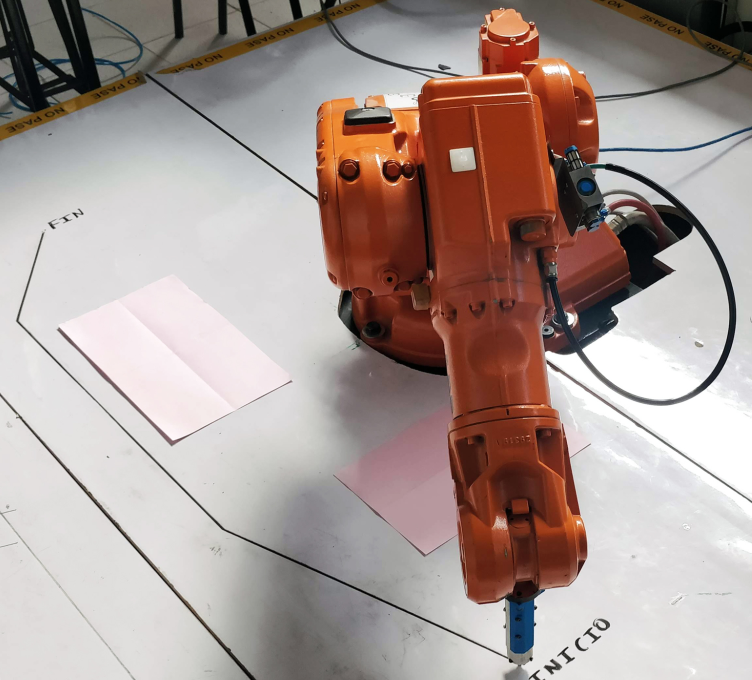
PSO applied on path planning
In my Master's degree I was involved with path planning for the industrial robot ABB IRB 140. I implemented a Particle Swarm Optimization algorithm to create colision free paths for basic motion tasks. Te code was developed in Matlab and the connection to the robot used a postprocessed code programmed in RAPID (Programming Language for ABB Robots). Document
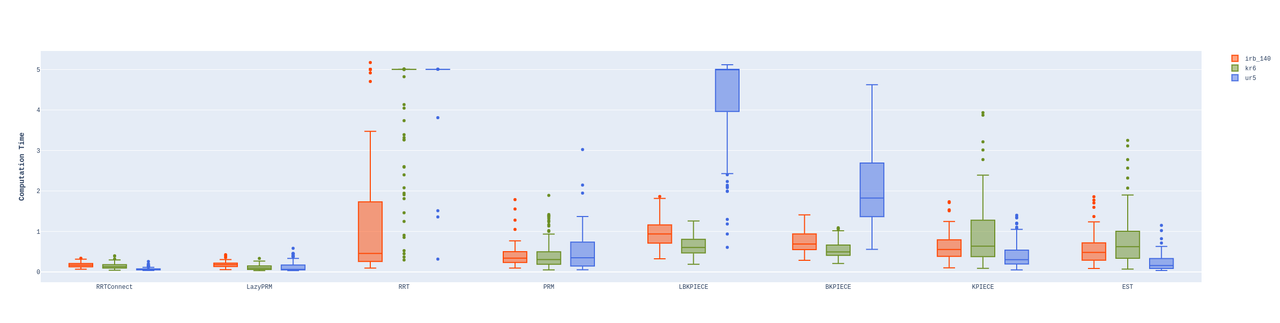
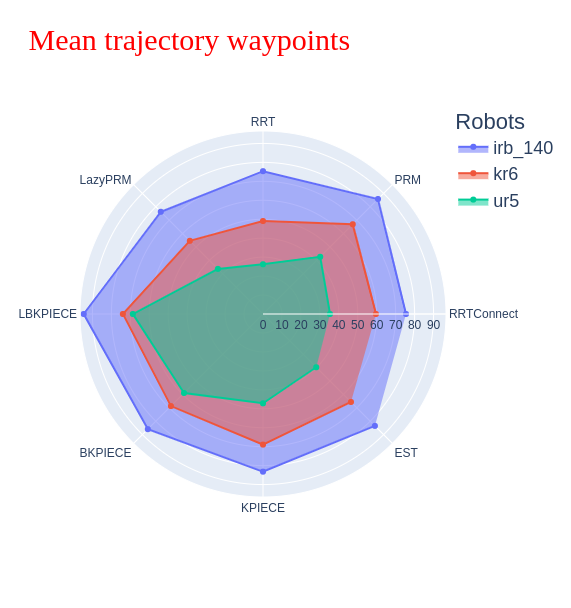
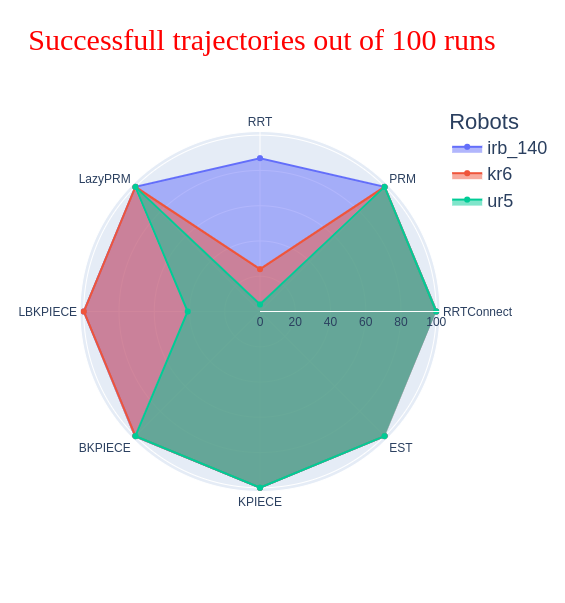
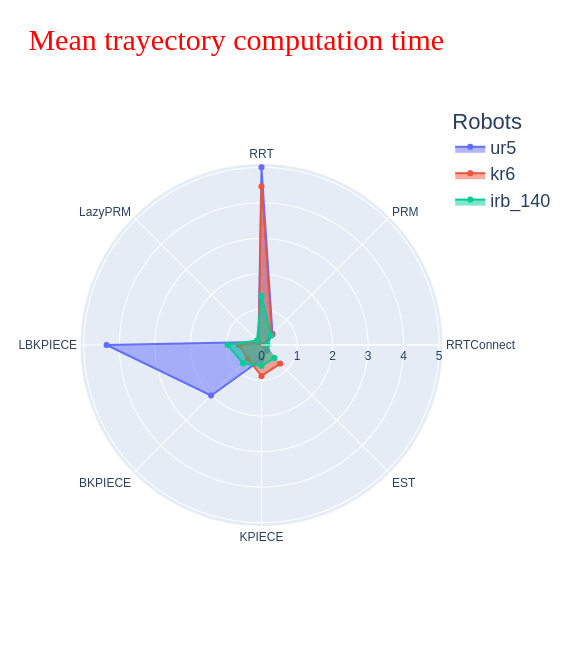
Motion planners benchmark
I am really into path planning for robots, actually it has been the main topic in both, my bachelor's and my master's thesis. I got involved with modern robotics tools such as ROS, Gazebo, Moveit, among others. In association with Sebastian Realpe, we have developed some packages for the ABB Robots located in the LabSIR. But the main job wwas the adaptation of a powerful tool called robowflex to a set of task for motion planning benchmarking.
ABB Packages repo: GithubBenchmark repo: Github